Návody
Armote
Vícemotorové osy
Návod v PDF
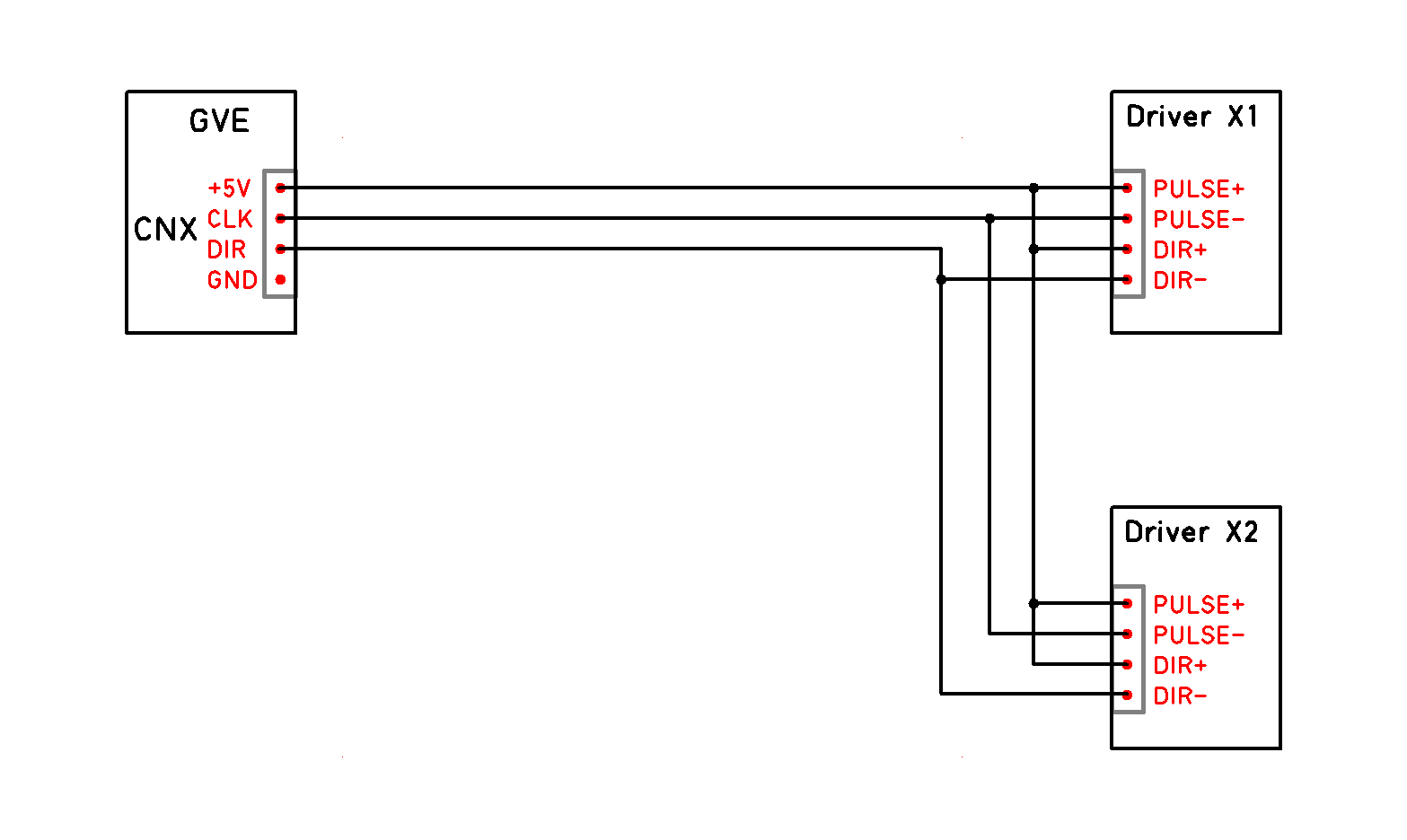
1. Rozvětvení řídících signálů
Výhody:
- Jednoduché na zapojení.
- Není potřeba žádné nastavení v Armote.
- Lze použít i pro 3-osé interpolační jednotky (GVE84, GVE124).
- Lze použít ruční ovladač MPG (mimo GVE84,GVE124 které MPG nepodporují).
- Nelze referovat každý pohon zvlášť.
- Omezení proudovým zatížením výstupu (oba pohony jsou řízeny jedním výstupem).
- Pouze jedna osa může mít dva pohony na každé použité interpolační jednotce.
Příklad zapojení osy X pro dva pohony
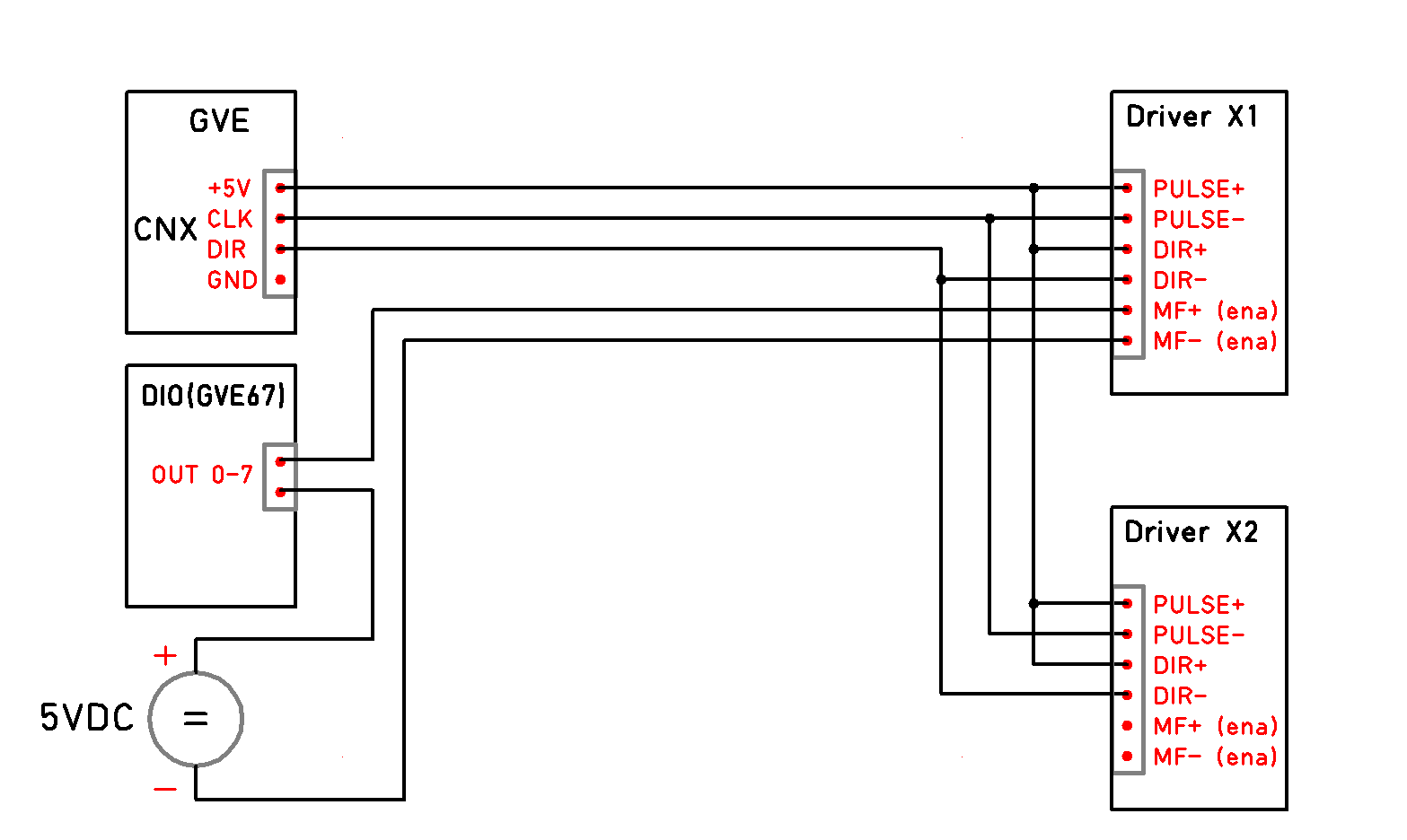
2. Rozvětvení řídících signálů s řízeným Enable motoru
Výhody:
- Není využit výstup osy A a lze ho použít pro řízení např. rotační osy.
- Lze použít ruční ovladač MPG.
- Lze referovat každý pohon zvlášť (stroje které nemají motory mechanicky synchronizované).
- Lze použít na více osách stroje i na pomocných interpolačních jednotkách.
- Omezení proudovým zatížením výstupu (oba pohony jsou řízeny jedním výstupem).
- Vyžaduje připojení GVE 67 DIO k systému.
- Složitější na nastavení a zapojení.
Příklad zapojení osy X pro dva pohony
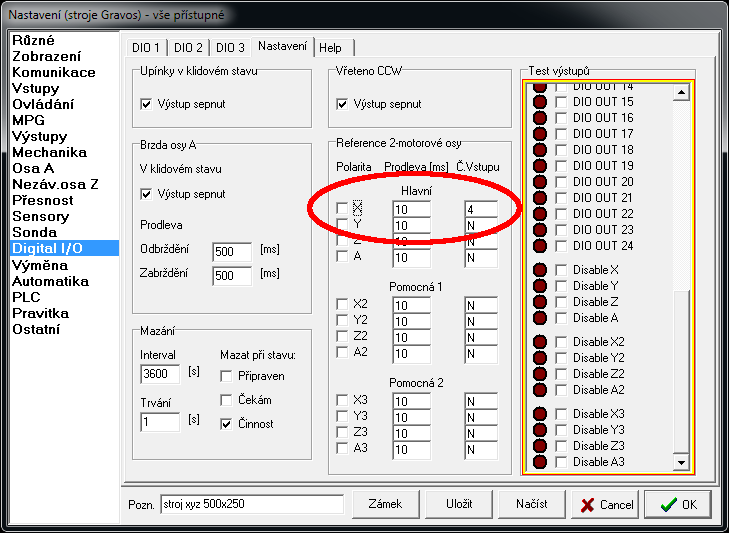
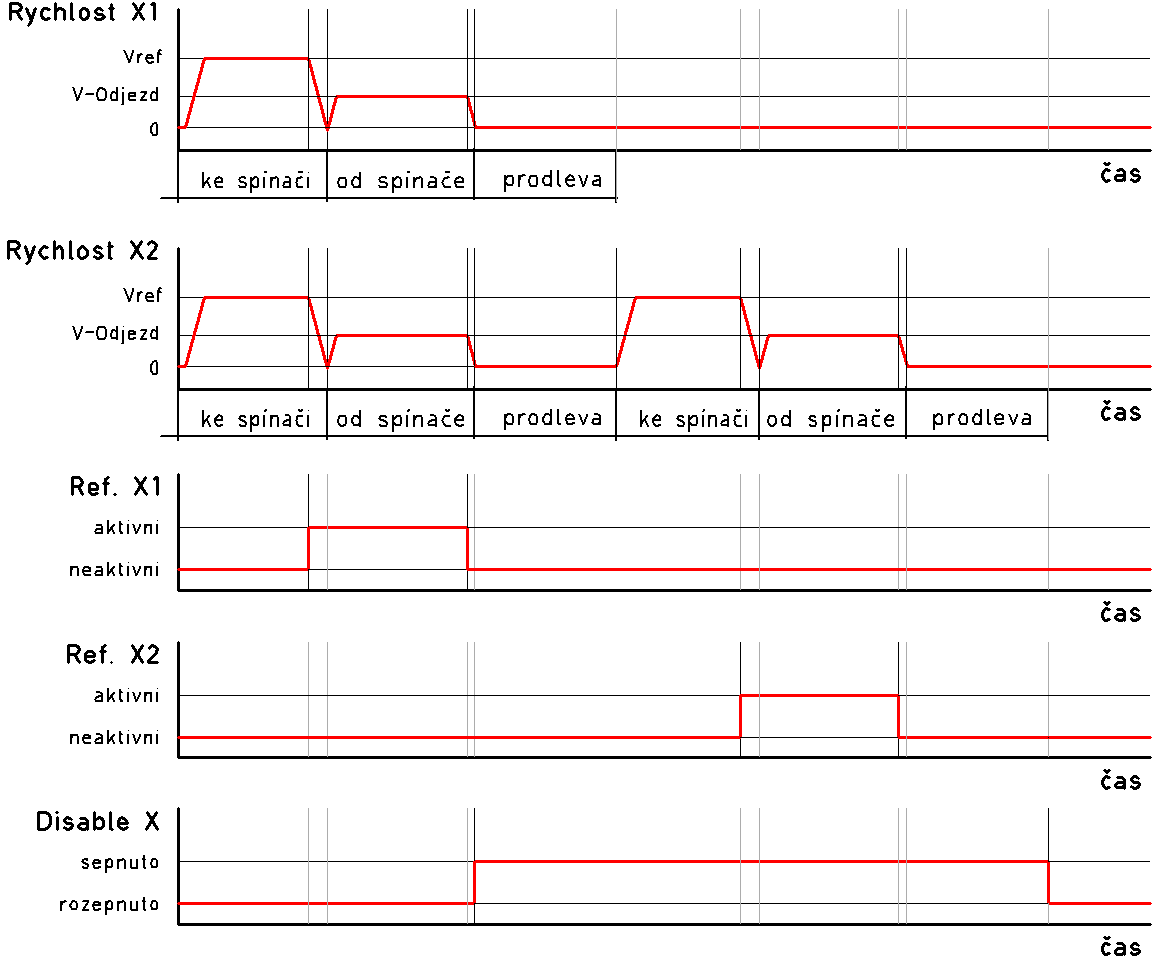
Nastavení v Armote v1.99
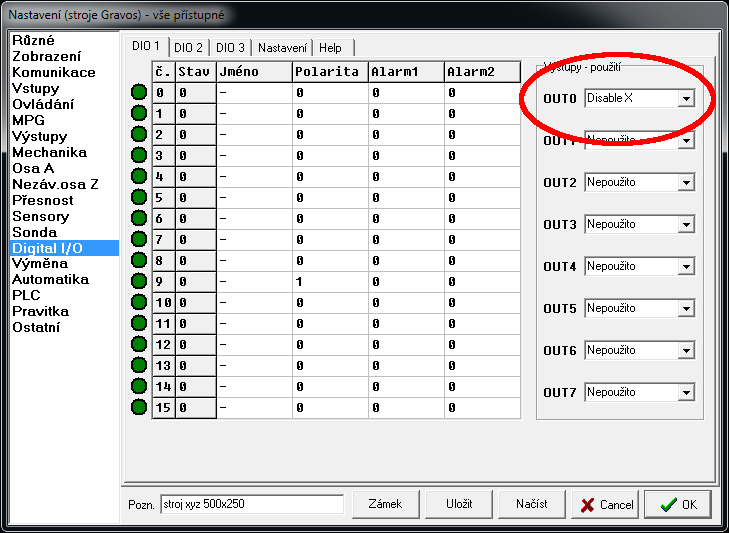
Polarita - nastavení polarity výstupu pro signál vypnutí pohonu.
Prodleva - časová prodleva po vypnutí driveru nebo jeho zapnutí funkcí Disable.
Č. vstupu ref. spínače - číslo vstupu, ke kterému je připojen ref. spínač druhého pohonu. Jeho polaritu a povolení k přerušení je potřeba pro nastavené číslo vstupu nastavit v části Vstupy.
Průběh reference
3. Přiřazení výstupu osy A k jiné ose v nastavení HW
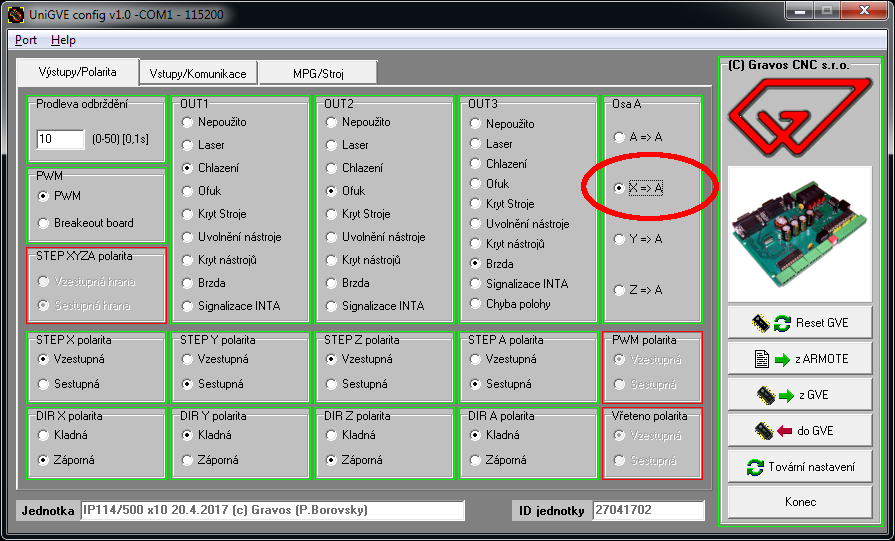
Program UniGVE config je součástí systému Armote, případně ho můžete stáhnout ZDE
Výhody:
- Jednoduché na zapojení.
- Není potřeba žádné nastavení v sw Armote. Přiřazení se nastavuje v interpolační jednotce.
- Umožňuje větší proudové zatížení výstupu (každý pohon je řízen samostatným výstupem).
- Lze použít ruční ovladač MPG.
- Výstup pro osu A nelze použít např. pro řízení rotační osy.
- Pouze jedna osa může mít dva pohony na každé použité interpolační jednotce.
- Nelze referovat každý pohon zvlášť.
- Lze použít pouze pro 4-osé interpolační jednotky.
Příklad zapojení osy X pro dva pohony
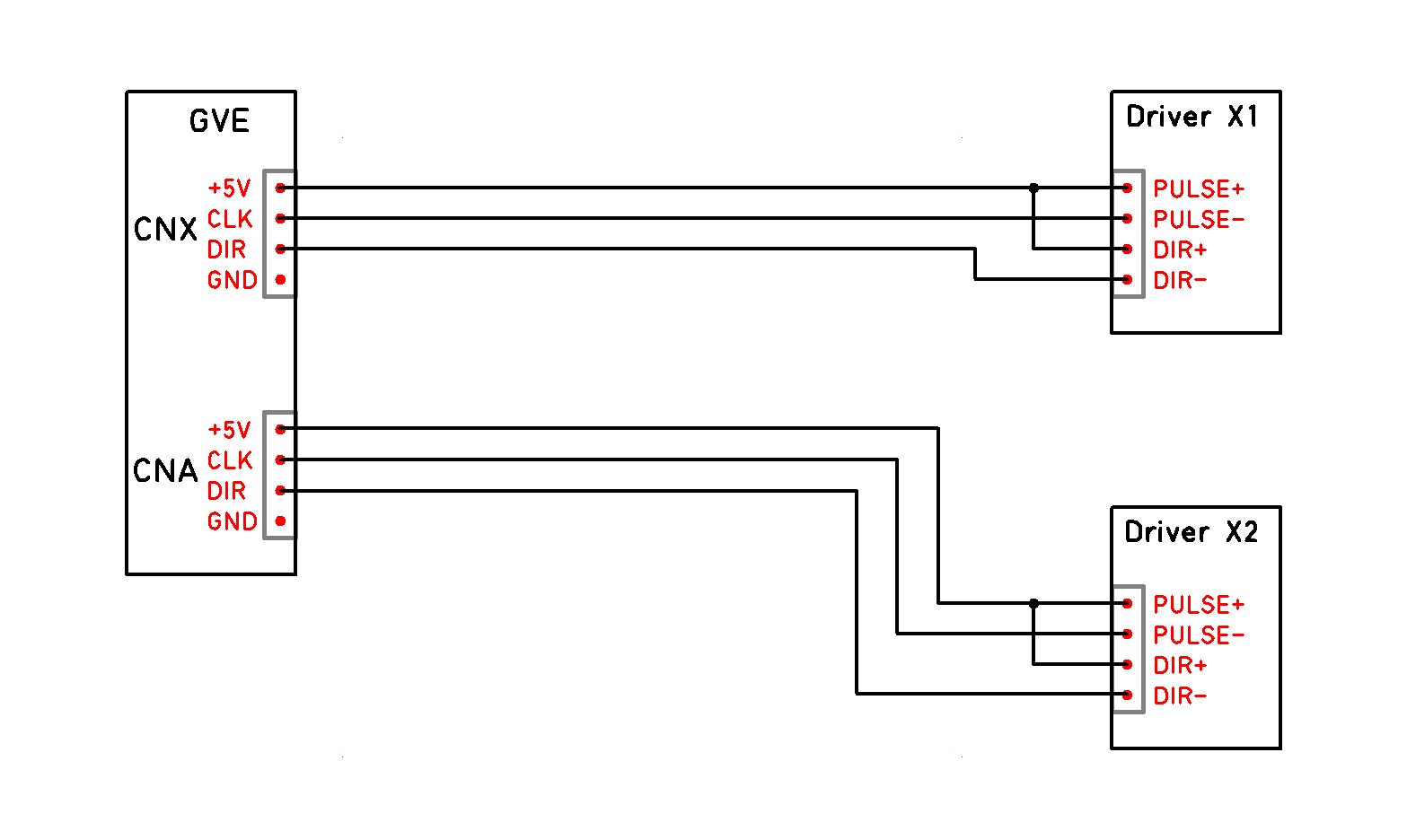
Nastavení v programu UniGVE config
4. Přiřazení výstupu osy A k jiné ose v nastavení SW
Výhody:
- Jednoduché nastavení pouze v SW.
- Umožňuje větší proudové zatížení výstupu (každý pohon je řízen samostatným výstupem).
- Lze referovat každý pohon zvlášť (stroje které nemají motory mechanicky synchronizované).
- Výstup pro osu A nelze použít např. pro řízení rotační osy.
- Pouze jedna osa může mít dva pohony a použitelné pouze pro hlavní interpolační jednotku.
- Nelze použít ruční ovladač MPG.
- Lze použít pouze pro 4-osé interpolační jednotky.
Příklad zapojení osy X pro dva pohony
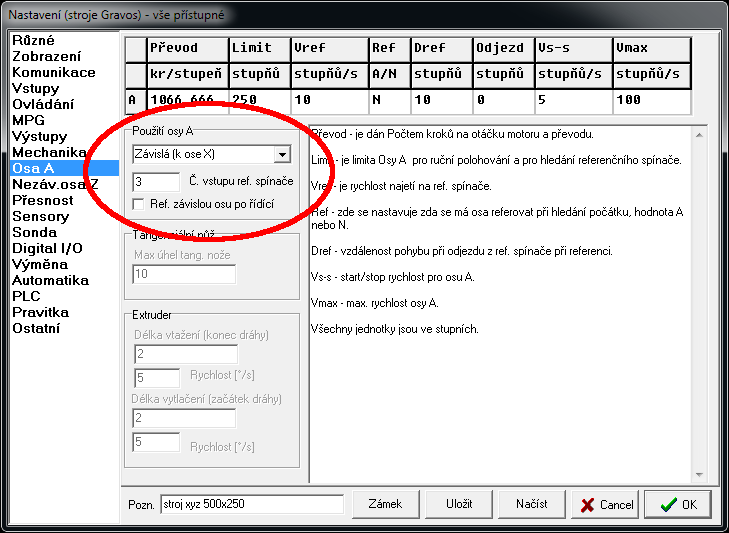
Nastavení v Armote v1.99
Referovat závislou osu po řídící - zapne funkci reference druhého pohonu.
Č. vstupu ref. spínače - číslo vstupu hlavní interpolační jednotky pro ref. spínač 2. pohonu.
|
© 2019 Gravos CNC s.r.o. |
Email: obchod@gravos.cz |
|